|

This lecture is part of the series "Trenchless 101" and serves to provide an overview of horizontal directional drilling (HDD). |
|
This lecture is part of the lecture series "Trenchless 101" and gives an overview of steerable trenchless construction methods for installation of cables and pipelines. The topic of horizontal directional drilling will be separately presented and discussed in part VIII of this lecture series. The non-steerable trenchless construction methods will be introduced in the lecture "Non-steerable new installation", the sixth part of the lecture series "Trenchless … |

|
|
(Image: Unmanned techniques)
|
|
(Image: Steerable techniques)
|
|
(Image: Soil displacement techniques)
|
|
Because the unmanned, non-steerable techniques have severe limitations in terms of directional accuracy, international efforts have been underway since the 1970s to develop unmanned steerable techniques for trenchless installation of cables and pipes. |
|

|
| (Image: Soil displacement technique - steerable impact moling)
|
The following are included in unmanned, steerable soil displacement techniques: - Steerable impact moling
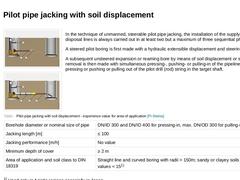
- Pilot pipe jacking with soil displacement
| |
(Image: Creating the pilot boring in the soil displacement technique with reference to [Stein89g] [Image: S&P GmbH] - Extending the pilot displacement and steering head)
|
(Image: Expansion boring in the soil displacment technique with reference … |
|
|
|
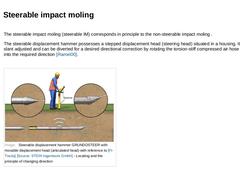
| The steerable impact moling (steerable IM) corresponds in principle to the non-steerable impact moling . The steerable displacement hammer possesses a stepped displacement head (steering head) situated in a housing. It can be slant adjusted and can be diverted for a desired directional correction by rotating the torsion-stiff compressed air hose by hand into the required direction [Ramei00]. (Image: Steerable displacement hammer GRUNDOSTEER with movable … |
|
|
|
In trenchless installation, a sensor (sonde) is situated in the front housing part of the displacement hammer and this is localized by means of the Walk-Over method and makes possible the determination of the position, depth, gradient and roll of the displacement hammer [Hesse94]. There are at least two working steps: - Creation of the bore
- Pulling-in the line(s) after completion of the boring by pulling-back the compressed air hoses or the drill strings.
|
|

|
|
|
|
(Image: Creating the pilot boring in the soil displacement technique with reference to [Stein89g] [Image: S&P GmbH] - Extending the pilot displacement and steering head)
|
|
(Image: Expansion boring in the soil displacment technique with reference to [Stein89g] [Image: S&P GmbH] - Extending the expander)
|
|
In the technique of unmanned, steerable pilot pipe jacking, the installation of the supply and disposal lines is always carried out in at least … |
|
|
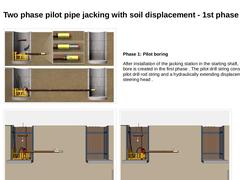
| (Image: Two phase pilot pipe jacking with soil displacement - Phase 1: Pilot boring)
|
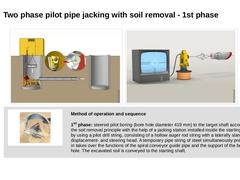
Phase 1: Pilot boring After installation of the jacking station in the starting shaft, the pilot bore is created in the first phase . The pilot drill string consists of the pilot drill rod string and a hydraulically extending displacement and steering head . | |
(Image: ACEMOLE PC 10 method [FI-NTTa] - Working step 1 [Image: S&P GmbH])
|
(Image: ACEMOLE PC 10 method [… |
|
|
|
|
(Image: Expansion boring in the soil displacement technique with reference to [Stein89g] [Image: S&P GmbH] - Connecting the expander with the pilot drill rod string)
|
|
(Image: Expansion boring in the soil displacment technique with reference to [Stein89g] [Image: S&P GmbH] - Extending the expander)
|
|
(Image: Expansion boring in the soil displacement technique with reference to [Stein89g] [Image: S&P GmbH] - Jacking completed, dismounting of the … |
|
|

|
Direction correction with pilot displacement head (Video: Directional correction with the IRONMOLE TP80-2 -Pilot displacement head) Direction correction with pilot cutting head (Video: Directional correction with the IRONMOLE TP80-2 - Pilot cutting head) |

|
|
Phase 1: Pilot boring A steered pilot boring is established from the starting shaft to the target shaft with a commercially available pilot pipe jacking plant using the soil displacement method . | |
(Image: Method sequence in the FRONT JACKING method with reference to [Stein89g] [Image: S&P GmbH] - Jacking the pilot drill rod string)
|
(Image: Method sequence in the FRONT JACKING method with reference to [Stein89g] [Image: S&P GmbH] - Pulling-in of … |
|
|

|
|
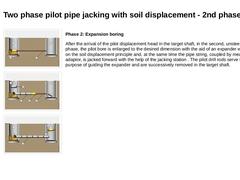
Phase 2: Pulling in the anchor pulling string After reaching the target shaft, the pilot drill rod string is pulled back to the starting shaft and at the same time a high-tensile anchor pulling string is pulled into the pilot boring . | |
(Image: Method sequence in the FRONT JACKING method with reference to [Stein89g] [Image: S&P GmbH] - Pulling-in of the pulling chain or winch cable)
|
(Image: Method sequence in the FRONT JACKING method with reference … |
|
|
|
| (Image: Working principle in the FRONT JACKING method with reference to [Stein89g] [Image: S&P GmbH])
|
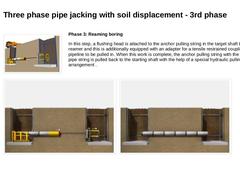
Phase 3: Reaming boring In this step, a flushing head is attached to the anchor pulling string in the target shaft to act as a reamer and this is additionally equipped with an adapter for a tensile restrained coupling to the pipeline to be pulled in. When this work is complete, the anchor pulling string with the coupled pipe string is pulled back … |
|

|
|
|
|
(Image: Unmanned techniques)
|
|
(Image: Steerable techniques)
|
|
(Image: Soil removal techniques)
|
|
The development of unmanned steerable techniques with soil removal is based on the application limits of the unmanned non-steerable techniques. Due to the application of steerable techniques unscheduled changes of direction can be adjusted as well as scheduled curves can be jacked. |
|
|
|
The following methods belong to the unmanned, steerable soil removal techniques: - Pilot pipe jacking
- Microtunnelling
- Horizontal directional drilling (HDD)
| |
(Image: Pilot pipe jacking with soil removal - 1st phase)
|
(Image: Pilot pipe jacking with soil removal - 2nd phase)
|
|
(Image: Microtunnelling with auger spoil removal)
|
(Image: Microtunnelling with hydraulic spoil removal)
|
(Image: Microtunnelling with pneumatic spoil removal)
|
|
|

|
|
|
|
(Image: Pilot pipe jacking with soil removal - 1st phase)
|
|
(Image: Pilot pipe jacking with soil removal - 2nd phase)
|
|
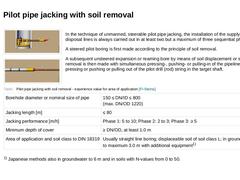
In the technique of unmanned, steerable pilot pipe jacking, the installation of the supply and disposal lines is always carried out in at least two but a maximum of three sequential phases. A steered pilot boring is first made according to the principle of soil removal. A subsequent unsteered expansion or reaming bore by means of … |
|
|
|
(Image: 1st phase: pilot boring by means of soil removal with reference to [FI-Bohrt] [Image: S&P GmbH])
|
(Image: Directional correction for pilot pipe jacking with reference to [Solta98a] [Image: S&P GmbH])
|
| | (Image: Pilot cutting head in the BM 500 method [FI-Bohrt])
Method of operation and sequence 1st phase: steered pilot boring (bore hole diameter 419 mm) to the target shaft according to the soil removal principle with the help of a jacking … |
|
|
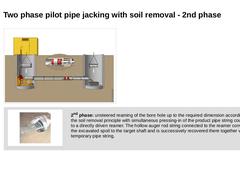
| (Image: 2nd phase: reaming boring and jacking of the product pipes with reference to [FI-Bohrt] [Image: S&P GmbH])
| | (Image: Reamer in the BM 500 method [FI-Bohrt])
2nd phase: unsteered reaming of the bore hole up to the required dimension according to the soil removal principle with simultaneous pressing-in of the product pipe string coupled to a directly driven reamer. The hollow auger rod string connected to the reamer conveys the excavated spoil … |
|

|
|
|
Definition 'Microtunnelling' according to CI/ASCE Standard |
|
|
(Image: Unmanned techniques)
|
|
(Image: Steerable techniques)
|
|
(Image: Soil removal techniques)
|
|
(Image: Soil displacement techniques)
|
|
In microtunnelling methods, jacking pipes are jacked (in one or two phases) from a starting shaft with the aid of a jacking station (in exceptional cases also using additional intermediate jacking stations ) up to a target shaft . At the same time an unmanned , remote controlled microtunnelling machine carries … |
|
|
|
(Image: Soil removal techniques)
|
|
(Image: Microtunnelling with auger spoil removal)
|
|
(Image: Microtunnelling with hydraulic spoil removal)
|
|
(Image: Microtunnelling with pneumatic spoil removal)
|
|
The unmanned, steerable microtunnelling techniques employed base generally on the principle of soil removal. Depending on the way of conveying the spoil, it is differentiated between: - Microtunnelling with auger spoil removal
- Microtunnelling with hydraulic …
|
|
